NEWS | Prof. Zhenglong SUN of SSE has been selected as a senior member of IEEE
About IEEE
IEEE is the world’s largest professional association for the advancement of technology. IEEE and its members inspire a global community through its highly cited publications, conferences, technology standards, and professional and educational activities. Through its global membership, IEEE is a leading authority on areas ranging from aerospace systems, computers and telecommunications to biomedical engineering, electric power and consumer electronics.
Senior member is the highest grade for which IEEE members can apply. It requires extensive experience, and reflects professional accomplishment and maturity. Only 10% of our more than 400,000 members have achieved this level. IEEE members can self-nominate, or be nominated, for Senior Member grade. To be eligible for application or nomination, candidates must:
1. Be engineers, scientists, educators, technical executives, or originators in IEEE-designated fields
2. Have experience reflecting professional maturity
3. Have been in professional practice for at least ten years (with some credit for certain degrees)
4. Show significant performance over a period of at least five of their years in professional practice
Personal Profile

Prof. SUN received his B.Eng. degree in Biomedical Engineering from the School of Electrical and Electronics Engineering, and M.Eng. in Mechatronic System and Design from the Mechanical and Aerospace Engineering, of Nanyang Technological University (NTU) in 2005 and 2007 respectively. In 2008, He worked as a Visiting Scholar at the Engineering Research Center for Computer-Integrated Surgical Systems and Technology, in the Johns Hopkins University. He continued to pursue his Ph.D. degree under the supervision of Professor Phee Soo Jay, in NTU and successfully completed his defense in 2013. He worked in the newly established SUTD-MIT International Design Center before he joined the Chinese University of Hong Kong, Shenzhen as a faculty member in April 2017. Currently he is also serving as the co-coordinator of the Biomedical Science and Engineering program in the School of Life and Health Sciences, and the deputy director of the intelligent robotics research center at the Shenzhen Institute of AI and Robotics for Society (AIRS).
His research interests include medical robotics/devices, human-robot interaction and collaboration, multi-modal perception and bio-inspired robots. During his Ph.D. study, he participated and developed a novel master-slave controlled multi-DOFs flexible endoscopic robot with haptic sensing and feedback, as one of the core team members. The team successfully completed world-first multi-center robotic operated endoscopic submucosal dissection (ESD) surgical procedures on human patients (three in India and two in Hong Kong). Now the platform has been spun off as a medtech startup company, EndoMaster Medical, winning over 10 million Singapore dollars series B funding. He also led the R&D work in many other medical applications, such as permanent magnet based real-time localization system for nasogastric intubation, and intelligent cushion for pressure ulcer prevention.
In the past 10 years, he has published over 50 journal and conference papers, one PCT patent and one book chapter. Based on Google Scholar database, his work has been cited over 970 times with an h-index of 14.
Scientific Research
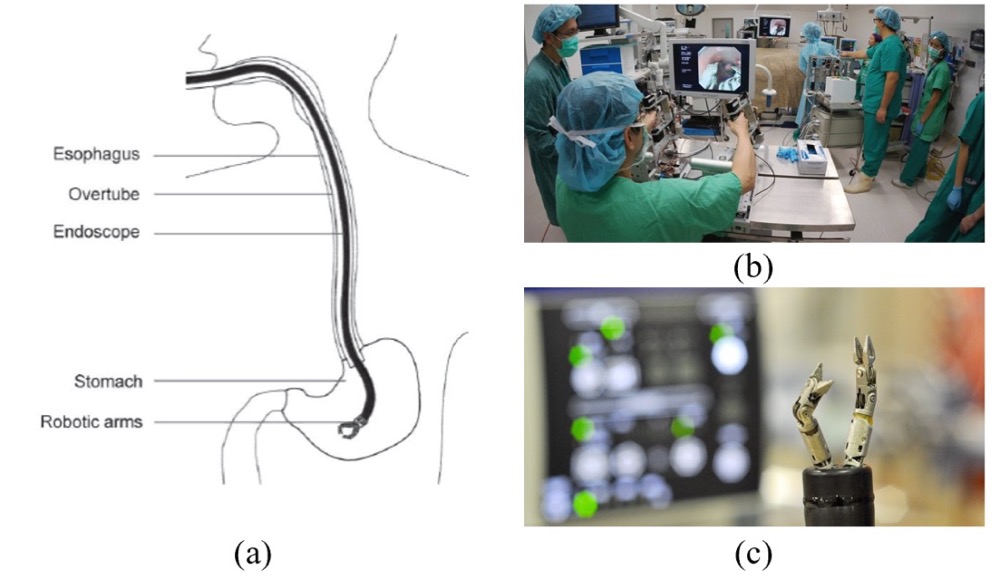
The concept of endoscopic surgical robot calls for full-specification laparoscopic surgery instruments that could pass through hyper-redundant, flexible channels of sub-centimeter diameter, in order to perform complex surgical task inside the gastrointestinal tract, for example, dissection of early-stage cancerous cells as shown in (a). Prof. Sun and the team developed a master-slave controlled robot and tested it in a series of clinical trails on animals and human. (b) shows the team in the surgery at CUHK Prince of Wales Hospital; (c) shows the latest development of the robot for commercialization.
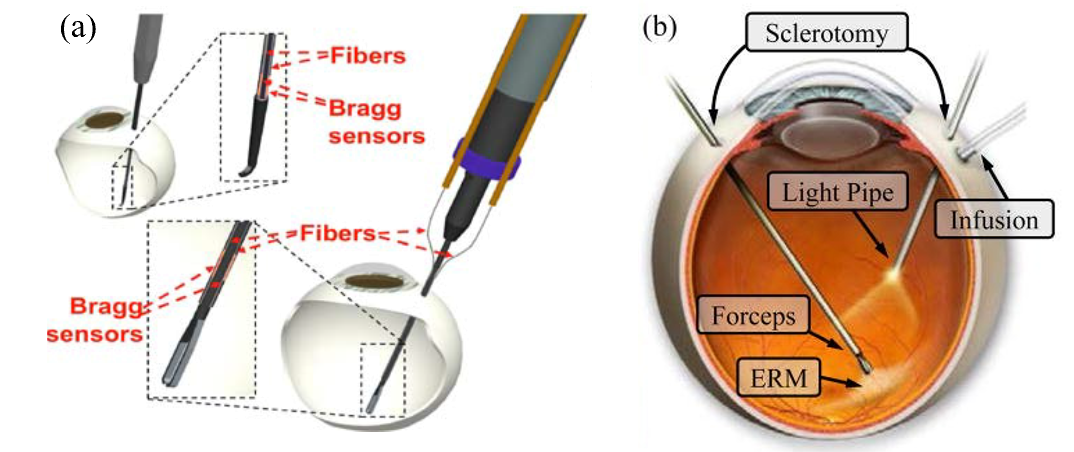
Prof. Sun also worked with scholars from the Johns Hopkins University, to work on the development of a force sensing tool for retinal microsurgery. In retinal microsurgery, it requires extremely delicate manipulation of retinal tissue where tool-to-tissue interaction forces could be below the threshold of human perception. So the team designed a force sensing tool using the optical FBG sensor; through innovative design of the mechanism and algorithm, the tool was able to measure forces with a resolution of 0.25mN.
- Prev
- Next