喜讯 | 理工学院孙正隆教授被评选成为IEEE高级会员
协会简介
IEEE全称是美国电子电气工程师学会(Institute of Electrical and Electronic Engineers),是国际性电子技术与信息科学工程师学会。致力于电气、电子、计算机工程和与科学有关的领域的开发和研究,IEEE是世界权威的标准制定机构,已在航空航天、信息技术、电力及消费性电子产品等领域制定了900多个行业标准,近1600项有效标准和600项标准正在开发之中。每年出版的电气电子和计算机科学领域的技术文献约占全球同类文献的1/3,同时结集出版电气工程、通讯、计算机理论及方法领域的专业技术期刊,数量达140余册。每年在全球举办的专业技术会议多达1800余场。作为世界上最大的专业技术组织之一(成员人数),在160多个国家拥有超过40万会员。在目前全球40万名IEEE会员中,高级会员的数量仅占10%。可见,IEEE高级会员是对当选者在学术造诣和其对全球电力技术发展所做贡献的高度认可。在研究或工程技术领域取得一定成就者,通过IEEE评审委员会的严格审核,才可获得IEEE高级会员资格:
1. 候选人必须是IEEE相关领域的工程师、科学家、教师、技术主管或发明家;
2. 从业经验需达到十年,并在其中五年有杰出表现。
教师简介

孙正隆教授,于新加坡南洋理工大学电子电气工程学院生物医学工程专业获得工科学士学位(B. Eng., 2005),而后加入机械与宇航工程学院下属的机器人研究中心攻读硕士学位(M. Eng., 2008)和博士学位(Ph.D., 2014)。08-09年曾作为访问学者在美国约翰霍普金斯大学计算机集成手术系统与技术工程研究中心参与项目研发。博士毕业后加入了新加坡科技设计大学和麻省理工学院联合成立的国际设计中心从事博士后研究。并于2017年回国加入香港中文大学(深圳)任教,现任理工学院助理教授, 同时担任理工学院生物医学工程专业负责人,深圳市人工智能与机器人研究院(AIRS)智能机器人研究中心副主任。2020年4月,荣获IEEE高级会员称号。
孙教授目前主要研究方向为手术医疗机器人,人机交互与人机协作,多模态感知和仿生机器人。博士期间参与开发了用于消化内镜手术具有力反馈功能和主从控制的多自由度柔性机器人,并带队应用自主研发的机器人系统完成了全球首次临床机器人消化内镜胃粘膜下剥离手术(三例手术于印度,两例于香港)。目前该手术机器人平台已于新加坡成立初创公司EndoMaster Medical,并顺利完成千万美元级别B轮融资。除此之外也开展了传感器信息融合,系统定位,以及机器学习方向的课题研究。主导研发了多项基于传感系统的临床医疗技术方案,如基于永磁体被动定位的导管定位及监测系统,和用于急诊室等待区的智能病床。目前其申报的专利技术已授权新加坡本地创业团队用于开发新型医疗设备。
孙教授在机器人及生物医学相关领域已累计发表20余篇国际期刊论文,30余篇国际高水平会议论文,一项PCT发明专利以及一篇书籍章节。研究成果受到国内外学者的广泛引用与重视。依据Google Scholar数据库中引用总数为975次(H-index为14)。
科研简介
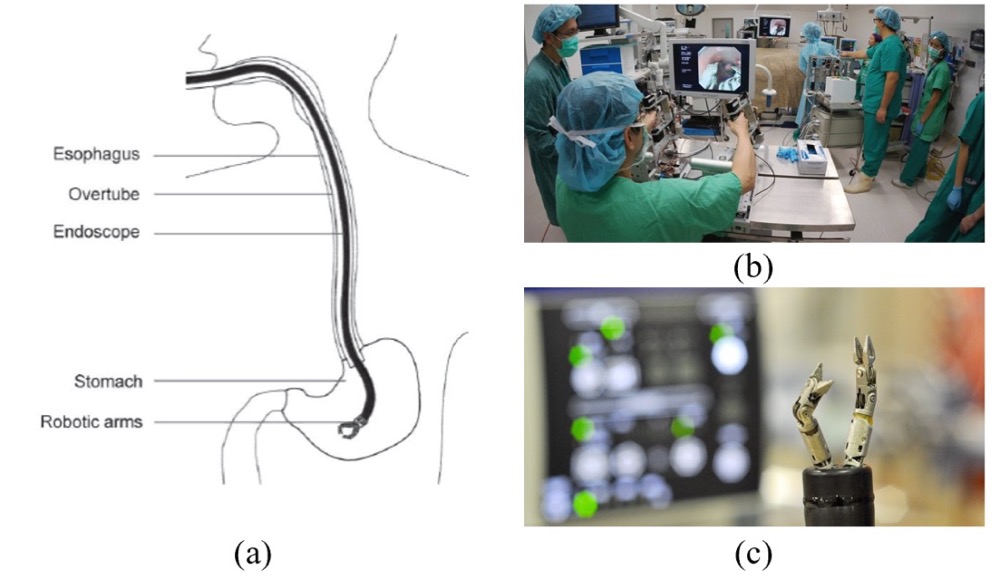
消化内镜手术机器人的概念是指将一套微创手术的微小机械臂通过柔性消化内镜弯曲的孔道送至消化道患处,对早期的癌变细胞进行切除治疗,如图(a)所示。孙正隆教授与团队率先研发了这一类型的机器人并最早用于临床测试;图(b)为孙正隆教授带队在香港中文大学威尔斯亲王医院进行临床试验的场景。目前这一技术已经在用于产业化开发,如图(c)所示。
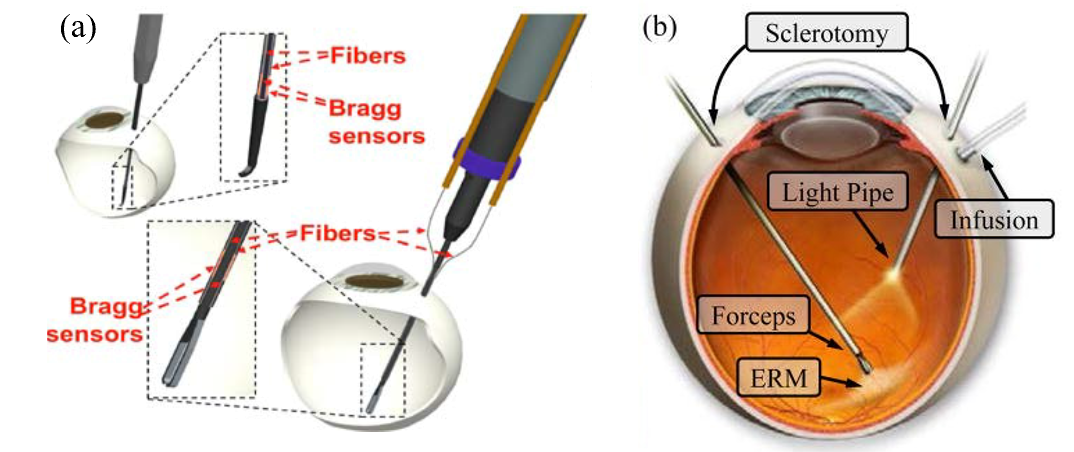
孙正隆教授也与约翰霍普金斯大学的学者合作,研发了用于眼球显微手术的微型力感知工具。在眼科手术中,细小工具在显微镜的帮助下进行精细操作,这过程中与眼底组织的接触力十分细小,甚至人手也无法精确感知。团队采用光纤光栅传感器,通过分布设计与算法,对末端的接触力进行测量,其分辨率可达到0.25mN。